Coalition formation and task assignment in MRS
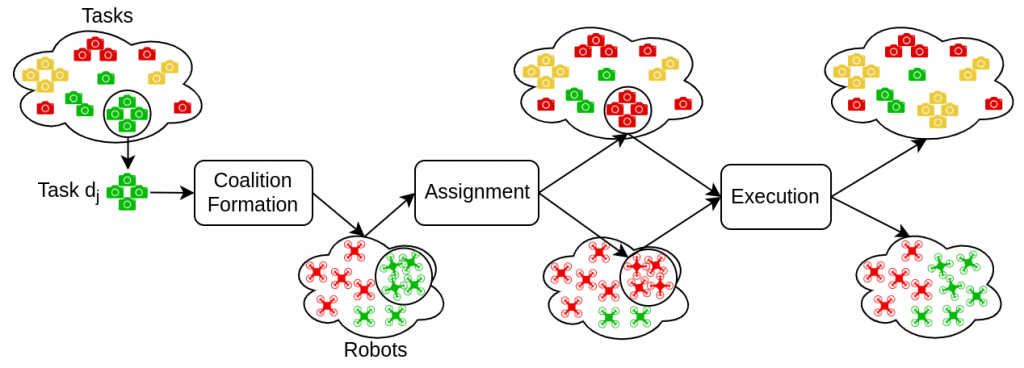
Multi-robot systems (MRS) accomplish many missions with different complexities, and their applications range from search-and-rescue and surveillance to transportation and entertainment. In many missions, multiple robots need to cooperate to complete tasks. The workflow of these multi-robot tasks involves forming coalitions of robots, assigning them to available tasks, and jointly … Continue reading Coalition formation and task assignment in MRS